OpenCV C++记录(十四):距离变换与基于标记的分水岭算法
距离变换算法
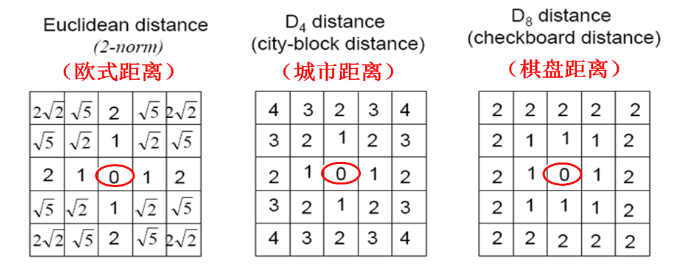
距离变换算法是基于二值化图像转换,得到与前景输入类似的灰度图,其基本原理是计算前景像素(255)到背景像素(0)的最小距离,背景像素值的距离仍然为0,距离变换算法能简单地在图像生成前景特征,在图像分割、特征提取中有重要作用,此处所说的距离是三种经典距离,在前面文章OpenCV C++记录(八):Sobel、Scharr、Laplacian、Canny算子简单提过,其数学特征是:
- 欧氏距离(DIST_L2):
- 曼哈顿距离(城市距离,DIST_L1):
- 棋盘距离(切比雪夫距离,DIST_C)
OpenCV实现
OpenCV提供了距离变换接口,可以计算二值图的前景和背景距离灰度分布情况:
1
2
3
4
5
6void distanceTransform(cv::InputArray src, //输入二值化图
cv::OutputArray dst, //输出距离
int distanceType, //三种类型距离
int maskSize, //掩图大小,一般为3
int dstType = 5 //输出类型,默认CV_32F=5,L1时可为CV_8U
)distanceType是城市距离L1或者棋盘距离C时,该函数使用maskSize=3的效果和其他奇数值效果一致,而如果是欧氏距离,mask=5的情况下会考虑更多的像素距离,求得最小距离精度更高,但时间也更长;
示例: 1
2
3
4
5
6
7
8
9
10
11cv::Mat_<uchar> m = (cv::Mat_<uchar>(5,5)<<
255,255,255,0,255,
255,255,255,0,255,
255,0,255,0,255,
255,255,255,255,255,
255,255,255,255,255
);
cv::Mat result;
cv::distanceTransform(m, result, cv::DIST_L1, 3, CV_32F);
cout << result << endl;
结果: 1
2
3
4
5[3, 2, 1, 0, 1;
2, 1, 1, 0, 1;
1, 0, 1, 0, 1;
2, 1, 2, 1, 2;
3, 2, 3, 2, 3]
对图片需要归一化后显示: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
using namespace std;
using namespace cv;
int main(){
Mat rawPic = imread("D:/Documents/Desktop/cards.png",0);
cv::Mat binary;
cv::threshold(rawPic, binary, 0, 255, cv::THRESH_BINARY | cv::THRESH_OTSU);
cv::Mat dist;
cv::distanceTransform(binary, dist, cv::DIST_L1, 3, CV_32F);
cv::imshow("dist",dist);
cv::Mat dist_norm;
cv::normalize(dist, dist_norm, 0, 255, cv::NORM_INF, CV_32FC1);
cv::Mat dist_8u;
dist.convertTo(dist_8u, CV_8UC1);
cv::imshow("dist_8u",dist_8u);
cout<<"Done"<<endl;
waitKey(0);
return 0;
}
效果: 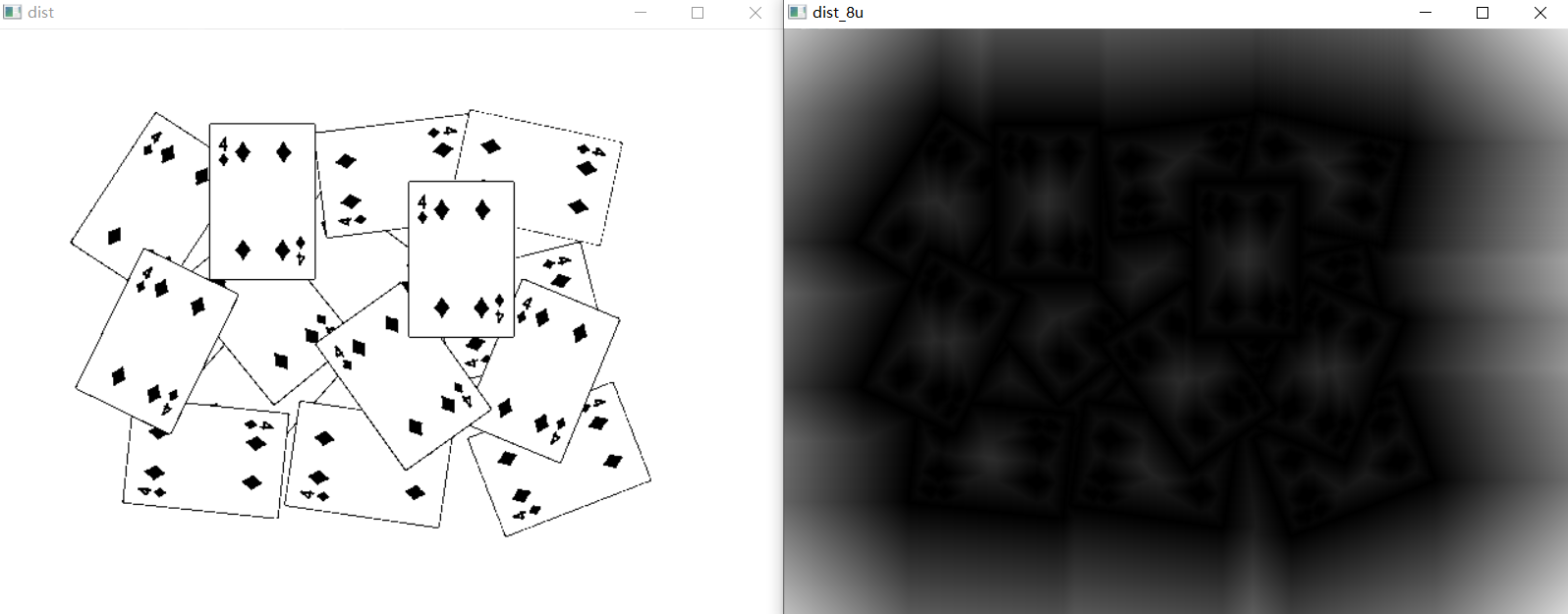
基于标记的分水岭算法
传统的分水岭算法将图像按照灰度划分成地形,灰度高的区域成为海拔高的山脊,灰度低的地方成为海拔低的山谷,然后进行漫水操作,当两片山谷的水交汇,就在交汇处建立大坝作为边界,这种边界就是图像分割的基本依据。这种算法的原理和缺点都很浅显,本质上就是根据图像的灰度极小值进行像素分割,然而图像中同一个物体对象也可能具有多个极小值,从而被错误分割成多个类别,这就是分水岭算法的过度分割(over-segmented)问题。
要解决这个问题,常见手段主要有几种:
设定阈值,当谷深超过一定的灰度高度,才采纳这个极小值;
做高斯平滑,本质上是平滑地形,去除图像噪声,减少其带来的极小值干扰;
基于标记的分水岭算法。
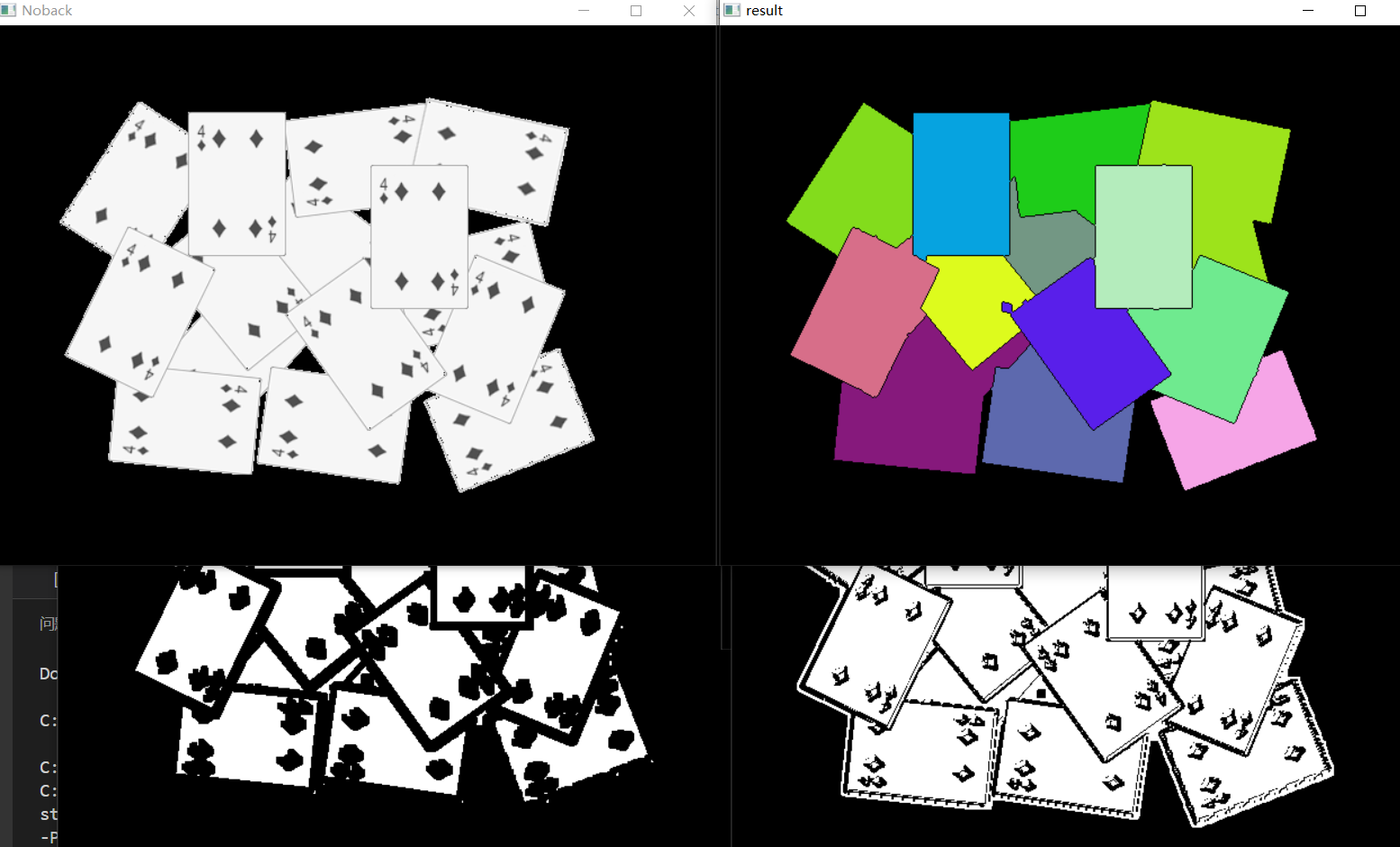
OpenCV提供的分水岭算法采纳了第三种做法,用户需要对图像的前景元素和背景元素进行标记,这些标记区域作为种子进行分水岭算法,从漫水的角度叙述,标记前景元素,相当于提前将某个区域全部灌水,分水岭算法就无需再对该区域进行分割;标记背景区域,就决定了开始漫水的极小值分布(种子分布),而抑制了噪声的影响,然后再进行漫水,对前景和背景区分明显的图像有较好的分割效果。可见,分水岭算法也是一种基于灰度相似性的阈值分割问题,但引入了灰度距离、极小值等概念,其往往比普通的二值化、大津法等有更好的阈值分割效果。
从算法上而言,前景和背景像素的标记并不复杂,前景像素可以通过前述的距离变换,获取距离0像素点足够远的像素,基于这些像素做形态学的腐蚀,所得到的区域作为前景是高置信的,而对于图像背景,如果存在背景信息(例如绿幕等)可以直接标记,否则就对图像的非0像素做形态学膨胀,那么膨胀区以外的像素,就认为是背景像素,其余未标记区域由分水岭算法确定边界。习惯上,前景像素会被标记成大于0的灰度,不同的物体前景使用不同的灰度,其余未知区域均标记成像素0,对于背景像素要求并不高,有的代码将其直接无视(为像素0),有的代码将其标记成正数的前景像素。
分水岭算法的接口很简洁: 1
cv::watershed(rawPic, marker); //输入rawPic CV_8UC3彩图和CV_32SC1 marker的标记图
CV_32S支持更多的轮廓输入范围;所有复杂的处理都来自如何更好地识别和标记前景轮廓,对于这个扑克分割任务,边缘检测比较重要,例子使用了Scharr算子处理。
另一个值得讨论的地方是circle(marker, Point(5, 5), 3, Scalar(255), -1),在marker的角落标记了一个255小圆,主要作用是告诉分水岭此处的轮廓是背景轮廓,这种方法比自己实现背景检测的方法更好,因为背景检测有可能将某些不完全清晰的边缘也去除了(例如下面注释的dilate方法),导致将某些物体也算入了背景,只要标记一个小圆,分水岭会自动将该小圆所在的连通域都算作背景。
1 |
|
参考链接: