OpenCV C++记录(七):霍夫变换、仿射变换、透视变换
霍夫变换(Hough Transform)
霍夫变换只是一种特征变换,服务于图像霍夫直线、圆的检测,这两种图形是霍夫变换最常用的两个应用,也算基本图形,基于此扩展霍夫检测能识别图像中几乎所有的几何图形。
对人而言判断一条直线或者某种图形是非常直接简单的,而对于计算机而言,它获取的信息是像素,如何确定某一群像素就是一条共线的直线、一个圆形,如果出现像素外溢,如何辨认出这种偏差影响,是比较复杂的任务,也是霍夫变换的基本任务。
霍夫直线检测基本原理
假设给定两点像素坐标(x1,y1)和(x2,y2),可知过两点得到一条直线y = kx + b,这是笛卡尔空间的表达式,重新描述这个表达式:
b = -xk + y,自变量为k、因变量为b,该空间称为霍夫空间,对于笛卡尔坐标的两点(x1,y1)和(x2,y2),分别对应b = -x1k + y1和b = -x2k + y2,即对应霍夫空间两条线,且x1不等于x2的情况下(相等的情况后文再讨论),两条霍夫空间直线必然交与一点,该点(b0,k0)同时满足两条霍夫直线方程,故知(b0,k0)就是原式y = kx + b的解。
因此,一句话表述就是,通过两点,需要获取y = kx + b直线的解(斜率、截距),实际上就是求解霍夫空间的相交点。
可能会有人不禁要问,两个点直接拟合不就好了吗,注意这里我们只使用了两点像素做说明,实际上的图片成千上万的像素,如果在笛卡尔空间筛选、拟合、回归是比较复杂的,而在霍夫空间中,这些像素点变成了直线,不同的像素点去拟合一条直线,实际上只是求解这些直线的相交点,如果像素点并不严格组成一条直线,在霍夫空间中则表现为出现多个交点,统计经过这些交点的直线数,选取最多直线经过的一个,就是最后的拟合结果,这被称为霍夫变换的投票机制,在标准霍夫变换中,累加器(Accumulator)会统计经过点的直线数,超过一定阈值才会被认为是一个直线。
当x1 = x2时,在b-k霍夫空间中无法交于一点,因此采用极坐标重新描述映射关系,令x = ρcosθ,y = ρsinθ,换到ρ-θ霍夫空间为:
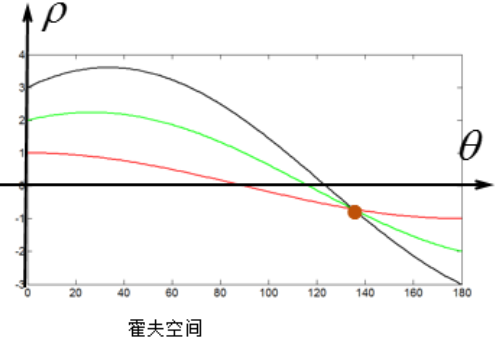
综述,不同像素的笛卡尔坐标组成的直线总能在霍夫空间找到相交的交点,该点就是直线的参数。
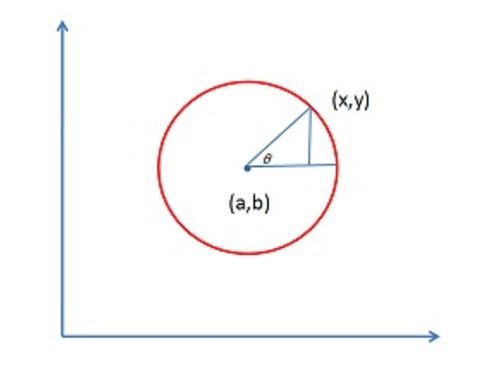
霍夫圆检测基本原理
实际上也是类似的,平面圆的自由度为3,分别是x、y坐标和半径长度r,因此其笛卡尔空间解析式在霍夫空间中成为三维交点,被空间直线穿过最多的三维交点,就是最后该平面圆的参数。基于此也可获知霍夫变换可应用于其他更复杂的图形检测任务,例如椭圆,其自由度是5,分别是x、y坐标和a、b长短轴以及旋转角度θ,原理上它对应的是五维空间的一个点参数,但直接计算可能复杂度过高,一般会有其他策略(梯度策略)来处理这样的检测任务,后文我们介绍OpenCV的处理。
OpenCV实现
OpenCV霍夫直线检测
OpenCV提供了cv::HoughLines和cv::HoughLinesP函数执行霍夫直线相关检测,对应了三种霍夫变换检测方法,分别是标准霍夫变换(Standard
Hough Transform,SHT)、多尺度霍夫变换(Multi-Scale Hough
Transform,MSHT)、累积概率霍夫变换(Progressive
Probabilistic Hough Transform,PPHT)。
SHT和MSHT都是关于函数cv::HoughLines:仅MSHT会使用参数srn和stn来降低距离和角度的分辨率
1
2
3
4
5
6
7
8
9
10
11void cv::HoughLines(
InputArray image, // 输入图像(二值化,通常为边缘检测后的图像)
OutputArray lines, // 输出直线参数(ρ, θ)的向量,注意是极坐标描述的,且为法向量
double rho, // 距离分辨率(单位:像素),推荐为1.0
double theta, // 角度分辨率(单位:弧度),推荐为pi/180
int threshold, // 累加器阈值(判定为直线的阈值)
double srn = 0, // 多尺度霍夫变换的 rho 除数(若为0,则为标准霍夫变换)
double stn = 0, // 多尺度霍夫变换的 theta 除数(若为0,则为标准霍夫变换)
double min_theta = 0, // 检测的最小角度(0)
double max_theta = CV_PI // 检测的最大角度(π)
);
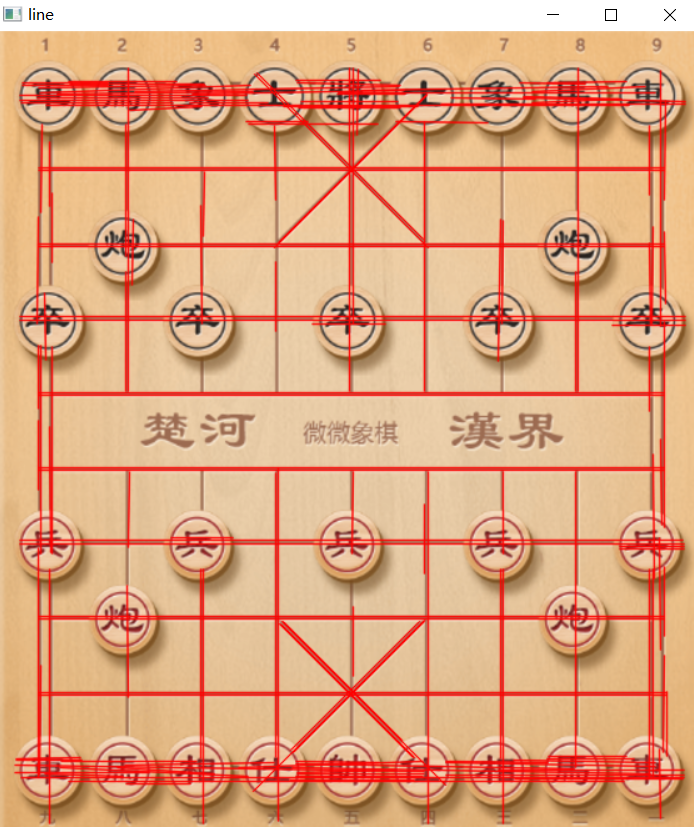
累积概率霍夫变换也是旨在优化SHT的概率,其通过随机采样来检测边缘中的像素,而不会使用累加器去统计每一个像素,从而降低统计的开销;更重要的是它能获取直线的端点信息,而SHT则没有检测端点的功能,因此PPHT一般用于线段检测;再者cv::HoughLinesP输出的lines数组以直角坐标系给出,而非SHT中的极坐标法向量;
PPHT直线检测函数如下: 1
2
3
4
5
6
7
8
9void cv::HoughLinesP(
InputArray image, // 输入图像(二值化,通常为边缘检测后的图像)
OutputArray lines, // 输出线段参数(起点和终点坐标)
double rho, // 距离分辨率(单位:像素)
double theta, // 角度分辨率(单位:弧度)
int threshold, // 累加器阈值(判定为线段的阈值)
double minLineLength = 0, // 线段的最小长度(小于此值的线段被丢弃)
double maxLineGap = 0 // 线段之间的最大间隔(小于此间隔的线段会被合并)
);
SHT直线检测
这里要注意,SHT没有识别端点的功能,描述平面直线的方法是描述它的法向量,输出的lines正是存储该法向量,假设为(a,b),因此直线的方向向量应该是(-b,a),我们定义了极大量10000,相当于往方向向量两端延申,就绘制出这条直线;这里还使用了Canny做边缘检测,这通常是目标检测、轮廓提取等前置处理,具体原理将在不久后的文章补充。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
using namespace std;
using namespace cv;
int main(){
Mat inputPic = imread("D:\\Documents\\Desktop\\note\\chess.jpg");
Mat gray;
cv::cvtColor(inputPic,gray,COLOR_BGR2GRAY); //灰度化
imshow("gray",gray);
cv::Mat edges;
cv::Canny(gray, edges, 50, 150); //Canny边缘检测
vector<Vec2f> lines; //直线法向量,分别是极径rou、与x轴夹角theta
HoughLines(edges, lines, 1, CV_PI/180, 200); //阈值200才输出直线
for (int i = 0; i < lines.size(); i++) {
float rou = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta); //法向量(a,b)
double x0 = a*rou, y0 = b*rou; //直线上一点
pt1.x = cvRound(x0 + 10000*(-b)); //方向向量是(-b,a),假设延申10000像素为绘制直线的端点
pt1.y = cvRound(y0 + 10000*(a));
pt2.x = cvRound(x0 - 10000*(-b));
pt2.y = cvRound(y0 - 10000*(a));
line(inputPic, pt1, pt2, Scalar(0, 0, 255), 1, LINE_AA); //连线
}
imshow("line",inputPic);
cout<<"Done"<<endl;
waitKey(0);
destroyAllWindows();
return 0;
}
效果: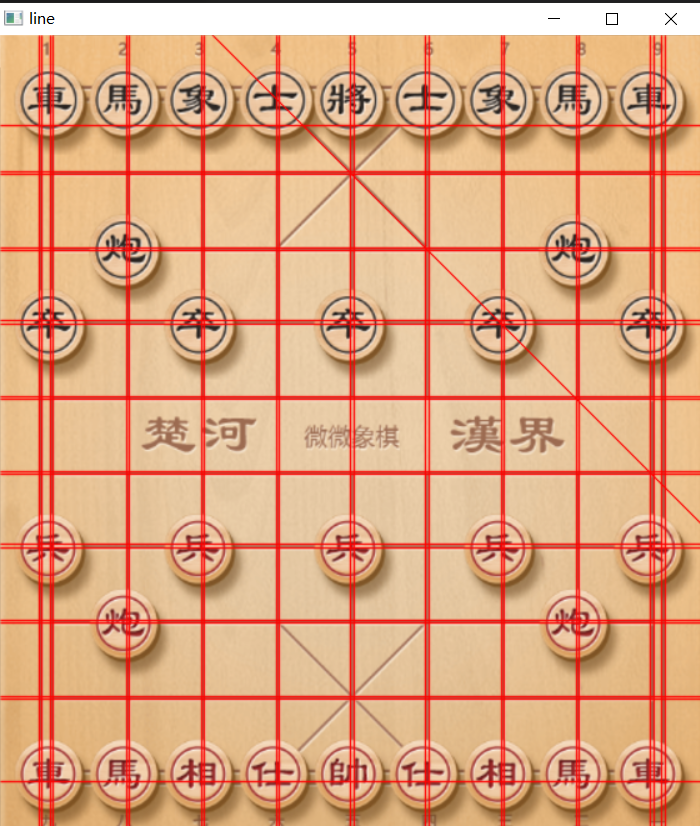
PPHT直线检测
cv::HoughLinesP输出的是线段的起点和终点坐标:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
using namespace std;
using namespace cv;
int main(){
Mat inputPic = imread("D:\\Documents\\Desktop\\note\\chess.jpg");
Mat gray;
cv::cvtColor(inputPic,gray,COLOR_BGR2GRAY); //灰度化
imshow("gray",gray);
cv::Mat edges;
cv::Canny(gray, edges, 50, 150);
vector<Vec4i> lines;
HoughLinesP(edges, lines, 1, CV_PI/180, 100,50,10);
for(int i=0; i<lines.size(); i++){
Point pt1,pt2;
pt1 = Point(lines[i][0],lines[i][1]);
pt2 = Point(lines[i][2],lines[i][3]);
line(inputPic, pt1, pt2, Scalar(0,0,255), 1, LINE_AA);
}
imshow("line",inputPic);
cout<<"Done"<<endl;
waitKey(0);
destroyAllWindows();
return 0;
}
OpenCV霍夫圆检测
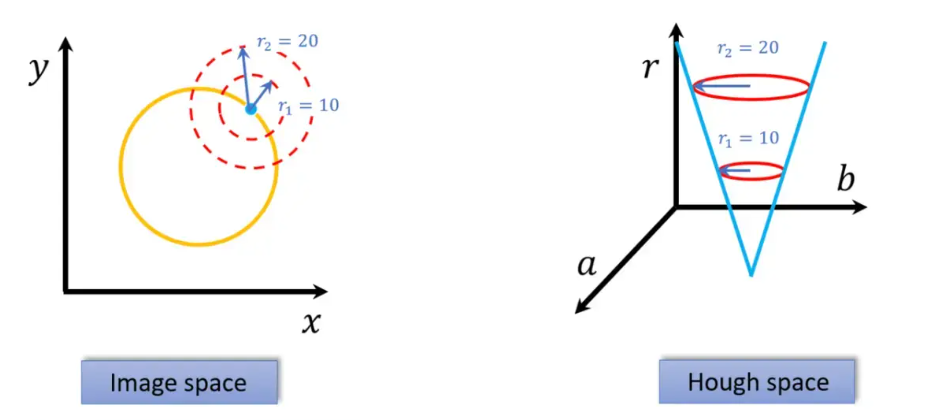
正如上面说过,圆的自由度是3,SHT情况下求解是这样的:圆在笛卡尔坐标表达式为:
从霍夫空间来看,不同的(a,b,r)参数组合的是一个圆锥体面,投票并统计这些锥面的三维交点就是参数结果。
SHT就说到这里,从维度上增加一维,计算的复杂度却大大增加,因此OpenCV没有使用SHT,而采用的是一种降维方法——霍夫梯度法(Hough Gradient Method)。
霍夫梯度法
霍夫梯度法将圆的参数估计划分成两个阶段,分别是圆心估计和半径估计:
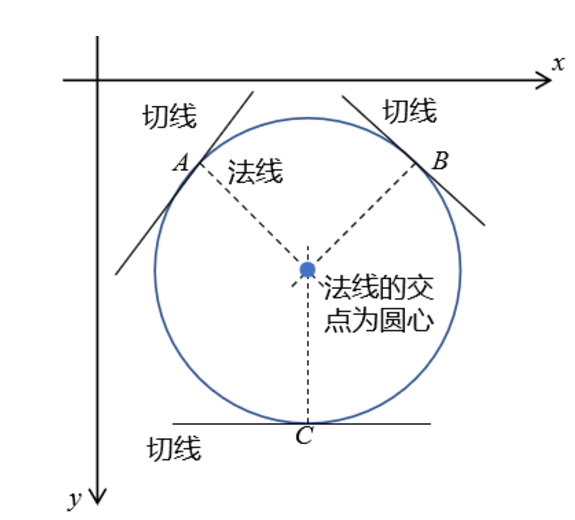 圆心估计:首先假设我们拿到了圆周像素(边缘像素),这些像素都可以看成构成圆周的一段“小切线”,根据线画圆的原理,两条切线的垂直平分线即可确定圆心。OpenCV中,通过Canny边缘检测可以拿到圆周像素,要求切线的法向量,实际上就是求像素的梯度(注意梯度方向就是方向导数最大的方向),这里引入Sobel算子进行计算(这也在不久后的文章中介绍),已知边缘像素的法向量,根据设定的最大和最小的可能的圆半径,将对每个候选圆心进行投票,得到最后的圆心;
圆心估计:首先假设我们拿到了圆周像素(边缘像素),这些像素都可以看成构成圆周的一段“小切线”,根据线画圆的原理,两条切线的垂直平分线即可确定圆心。OpenCV中,通过Canny边缘检测可以拿到圆周像素,要求切线的法向量,实际上就是求像素的梯度(注意梯度方向就是方向导数最大的方向),这里引入Sobel算子进行计算(这也在不久后的文章中介绍),已知边缘像素的法向量,根据设定的最大和最小的可能的圆半径,将对每个候选圆心进行投票,得到最后的圆心;
半径估计:得到圆心后只需要再根据圆心和边缘像素距离进行累计投票(圆心离各边缘像素的距离应该是一致的),即可得到半径长度。
可见三维的估计任务转换成梯度-半径二维估计问题,因此提高了计算效率和鲁棒性。
OpenCV的接口为: 1
2
3
4
5
6
7
8
9
10
11void cv::HoughCircles(
InputArray image, //一般是灰度图,必须是单通道
OutputArray circles, //输出圆心、半径(x,y,r)
int method, //仅支持梯度方法cv::HOUGH_GRADIENT
double dp, //一般为1或2,1代表分辨率同图像,2代表为图像一半,dp越大:分辨率越低、精度越差、计算越快
double minDist, //圆心最小距离,防止重叠严峻
double param1, //Canny的高阈值,低阈值为param1/2
double param2, //累加器阈值,越低检测出对象越多
int minRadius, //最小圆半径
int maxRadius //最大圆半径
)
霍夫圆检测实例: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
using namespace std;
using namespace cv;
int main(){
Mat inputPic = imread("D:\\Documents\\Desktop\\note\\chess.jpg");
Mat gray;
cv::cvtColor(inputPic,gray,COLOR_BGR2GRAY); //灰度化
imshow("gray",gray);
vector<Vec3f> circles;
HoughCircles(gray, circles, cv::HOUGH_GRADIENT, 1, 10, 100, 60, 10, 50);
for(int i=0; i<circles.size(); i++){
Point pt0 = Point(cvRound(circles[i][0]),cvRound(circles[i][1]));
int r = cvRound(circles[i][2]);
circle(inputPic, pt0, r, Scalar(0,0,255), 3, LINE_AA);
}
imshow("circle",inputPic);
cout<<"Done"<<endl;
waitKey(0);
destroyAllWindows();
return 0;
}
仿射变换(Affine Transformation)
仿射变换应该是一个并不陌生的概念,以往我们在两个地方常常听到这个名词。其一是高中的圆锥曲线,通过将椭圆仿射到圆去求解一些几何问题,其二是人脸识别任务中,当遇到非正脸的识别常见,我们常常加入仿射变换使得各个特征点和正脸图片对齐,再执行识别。
仿射变换的数学原理描述为:假设图像像素坐标为(x,y),对其做这样的运算得到映射到新坐标:
a11是将x坐标进行缩放,a22是对y坐标进行缩放,a12是对x方向的两条边进行反方向拉动(正方形->平行四边形),a21是对y方向两条边反方向拉动(正方形->平行四边形),tx、ty则是分别向x、y方向进行平移。可见仿射变换是一种线性变换。
因此,原地变换相当于:
平移矩阵
仅使用平移、旋转的仿射变换几乎没有改变图像的相关特征,例如任意两点距离、两线的夹角、对象形状,因此这两种操作也是称为刚性变换(欧几里得变换)。
平移矩阵是最好理解的:
旋转矩阵
这个是根据极坐标推导的,令
OpenCV仿射变换
然后就可以理解CV仿射变换的操作了,CV提供了cv::warpAffine函数进行仿射变换计算,其中变换矩阵将上述旋转、平移系数合并在一个2×3矩阵,因为仿射变换可能出现定义外的像素,也需要插值和边值处理。
1
2
3
4
5
6
7
8
9void cv::warpAffine(
InputArray src, // 输入图像
OutputArray dst, // 输出图像
InputArray M, // 2x3 变换矩阵
Size dsize, // 输出图像的大小
int flags = INTER_LINEAR, // 插值方法
int borderMode = BORDER_CONSTANT, // 边界填充模式
const Scalar& borderValue = Scalar() // 边界填充值
);
图像平移
图像右下平移(50,100): 1
2
3
4
5
6
7
8Mat_<float> pan = (Mat_<float>(2,3)<< //平移
1,0,50,
0,1,100
);
Mat output;
warpAffine(rawPicColor,output,pan,rawPicColor.size(),INTER_LINEAR,BORDER_CONSTANT,Scalar(0,0,0));
imshow("Pan",output);
图像旋转
这里一个特别的地方是进行旋转是默认是相对(0,0)坐标进行的,因此不能直接使用公式定义图片旋转操作,CV提供了cv::getRotationMatrix2D可用于定义旋转矩阵,接受几何中心(设置为图像中心)、逆时针角度(顺时针为负)、缩放因子,最后使用cv::warpAffine旋转变换:
1
2
3
4
5//注意中心,cols在前,rows在后,逆时针45度
Mat rotate = cv::getRotationMatrix2D(Point(rawPicColor.cols/2,rawPicColor.rows/2),45,0.5);
Mat output;
warpAffine(rawPicColor,output,rotate,rawPicColor.size(),INTER_LINEAR,BORDER_CONSTANT,Scalar(0,0,0));
imshow("rotate",output);
图像放缩
除了刚性变换,仿射变换还可以完成图像缩放等处理:x方向拉伸两倍、y方向缩小至0.5倍:
1
2
3
4
5
6
7
8Mat_<float> resize_ = (Mat_<float>(2,3)<<
2,0,0,
0,0.5,0
);
Mat output;
warpAffine(rawPicColor,output,resize_,rawPicColor.size(),INTER_LINEAR,BORDER_CONSTANT,Scalar(0,0,0));
imshow("resize_",output);
透视变换(Perspective Transformation)
仿射变换最大的特点是它是一种线性变换,例如在原来图像中平行的两个对象,变换后也一定是平行的。透视变换则是一种非线性变换,我们的图像处理大多数来自三维空间需求,在三维成像中近大远小是基本规律,物体在远处的光线总是收敛的,导致这种视图就像梯形一样甚至发生相交,透视变换能利用非线性变换来描述两种视角的关系,这个非线性变换是一个3×3的矩阵,称单应性矩阵H。
透视变换是一个二维——三维——二维的过程,至于哪个二维是正视角,在工程中好像并不重要,反正透视变换透过三维空间完成了一组二维视角的转换。假设原始二维坐标为(x,y),透视后变换后坐标为(x2,y2),现在我们开始描述其数学过程:
因为是空间三维变换,我们将(x,y)表示为(x,y,1),表示其始终在z=1的图像平面,再与单应性矩阵运算:
此时单应性矩阵可以表示为:
再拓展,仿射变换实际上是透视变换的一个子集,仿射变换矩阵可表示为:
OpenCV透视变换
cv::getPerspectiveTransform通过四个源点和四个目标点即可计算其八个映射参数:
1
2
3
4
5Mat getPerspectiveTransform(
InputArray src, //4个源点
InputArray dst, //4个目标点
int solveMethod = DECOMP_LU //求解线性方程组方法,默认即可
) cv::warpPerspective即可完成透视变换:
1
2
3
4
5
6
7
8
9void warpPerspective(
InputArray src, //源图
OutputArray dst, //输出图像
InputArray M, //透视变换矩阵
Size dsize, //输出图像大小
int flags=INTER_LINEAR, //插值方法
int borderMode = BORDER_CONSTANT, //边值处理方法
const Scalar& borderValue = Scalar() //边值处理默认颜色
);
透视变换实例:
1 |
|
效果:  通过透视变换实现了到另一个二维视角的转换。
通过透视变换实现了到另一个二维视角的转换。
参考链接: