OpenCV C++记录(五):插值算法:最近邻插、双线性插值、双三次插值
插值算法
图像放缩的过程也是像素增加、减小的过程,因此需要插值算法、采样算法等,在保证一定性能的基础上争取较好的输出质量。记录几种方法原理,对应OpenCV中几种常用插值算法,分别是最近邻插值、双线性插值、双三次插值,其性能依次递减,效果依次递增,其中双线性插值是二者比较均衡的算法,是许多插值模型的默认模式。如果对原生插值算法无兴趣,可直接跳过本文,看简单的放缩函数,不小心引出这么一大段,我想也是比较扯蛋,但终归有所收获。
最近邻插值INTER_NEAREST
最近邻插值最大的特点是:不会产生新的像素,目标图像的像素均来自源图像,新图像坐标与源图像坐标对应如下:
例如将2*2的图片放大成4*8的图片,新图(3,8)位置的像素计算:
最近邻插实现图像放大:由于我先完成了双三次和双线性插值算法再回头写这个,有些问题反而在篇头省略了。例如这里的int y_ = round((i+0.5)*scale_y-0.5)等详见后文《双线性插值优化》讨论,是一种几何中心对齐,主要是用于纠正计算参考点时几何中心偏差。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
using namespace std;
using namespace cv;
//三通道输入图像、目标高度、宽度
Mat getNearestMat(Mat& src_mat, int target_height, int target_width){
Mat result(target_height,target_width,src_mat.type()); //目标矩阵
//缩放尺度
double scale_x = (double)src_mat.cols/(double)target_width;
double scale_y = (double)src_mat.rows/(double)target_height;
for(int i=0; i<target_height; i++){
int y_ = round((i+0.5)*scale_y-0.5); //参考点y_: 目标像素y在源矩阵的投影坐标
//截断y范围
y_ = y_ >= src_mat.rows ? src_mat.rows-1 : (y_ < 0 ? 0 : y_);
for(int j=0; j<target_width; j++){
int x_ = round((j+0.5)*scale_x-0.5); //参考点x_: 目标像素x在源矩阵的投影坐标
//截断x范围
x_ = x_ >= src_mat.cols ? src_mat.cols-1 : (x_ < 0 ? 0 : x_);
result.at<Vec3b>(i,j)[0] = src_mat.at<Vec3b>(y_,x_)[0]; //三通道
result.at<Vec3b>(i,j)[1] = src_mat.at<Vec3b>(y_,x_)[1];
result.at<Vec3b>(i,j)[2] = src_mat.at<Vec3b>(y_,x_)[2];
}
}
return result;
}
int main(){
Mat rawPic = imread("C:\\Users\\24364\\C_git\\opencv_test\\jLena.jpg",1);
imshow("rawPic",rawPic); //原始:512×512
Mat NearestMat = getNearestMat(rawPic,1024,1024); //放大两倍
imshow("NearestMat",NearestMat);
cout<<"Done";
waitKey(0);
destroyAllWindows();
return 0;
}
效果: 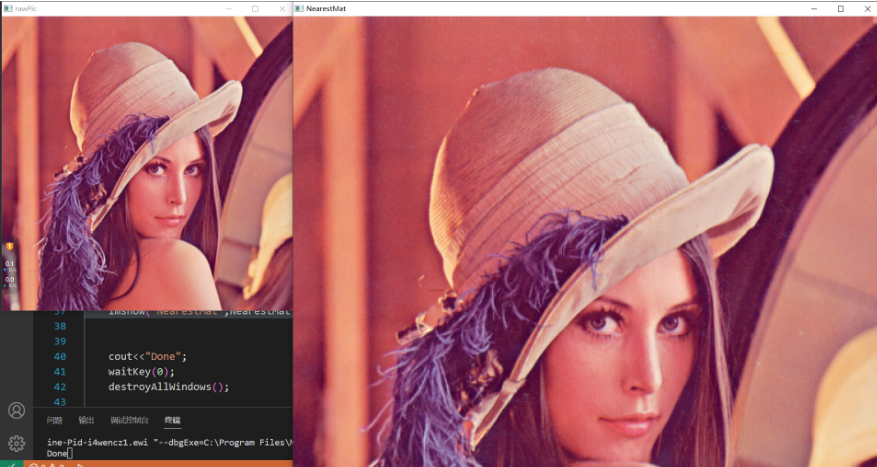 肉眼看起来也效果不算太差,值得一提的是,OpenCV的最近邻插和本文的方法应该是有差异的,在非整数变换时输出不一致的结果,具体差异有待参详源码。后文实现的双线性插值和双三次插值则基本没有该问题,只是OpenCV会做更多的并行计算优化。
肉眼看起来也效果不算太差,值得一提的是,OpenCV的最近邻插和本文的方法应该是有差异的,在非整数变换时输出不一致的结果,具体差异有待参详源码。后文实现的双线性插值和双三次插值则基本没有该问题,只是OpenCV会做更多的并行计算优化。
双线性插值INTER_LINEAR
对于双线性插值,第一步和最近邻插值是一样的,只是不再简单地进行四舍五入了。假设现在仍然得到(srcX=1.5,srcY=1.75)的结果,可知这点落在原图的四点像素之间,分别是(1,1)、(1,2)、(2,1)、(2,2),现在需要基于此四点确定原图点(1.5,1.75)像素,这个点的像素是四点像素的混合权值和,这就是双线性插值的基本问题。
回顾线性插值问题,基于两个点取确定一点: 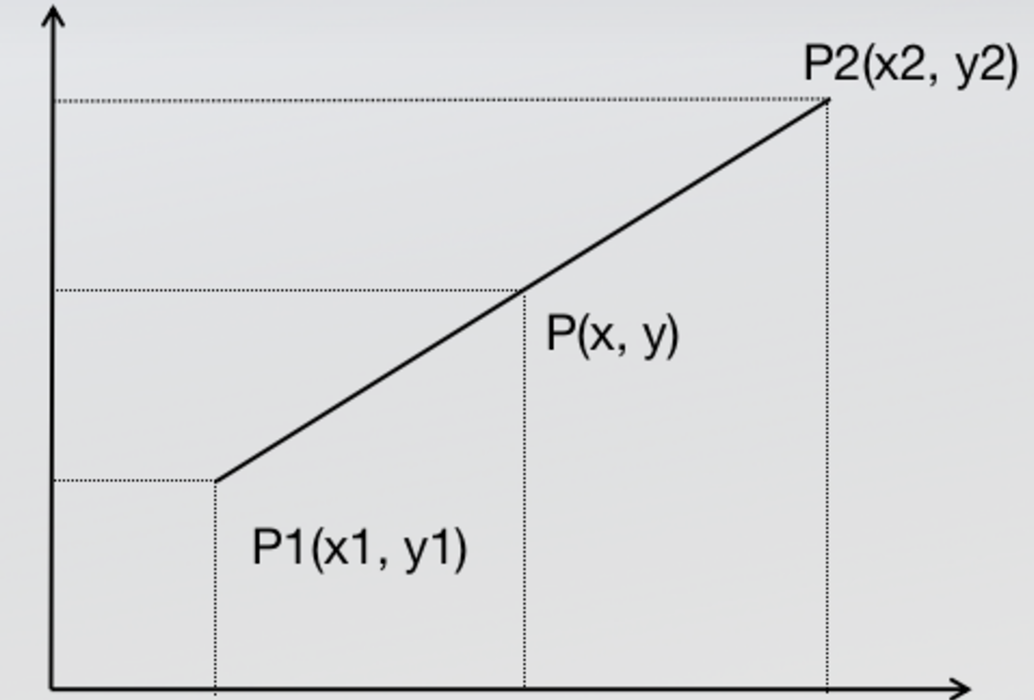 假设y=f(x),其中x为一维坐标,f(x)为该坐标的像素,有:
假设y=f(x),其中x为一维坐标,f(x)为该坐标的像素,有:
应该体会到,一条线段(一维空间)的x坐标确定,此点的像素y也是确定的。
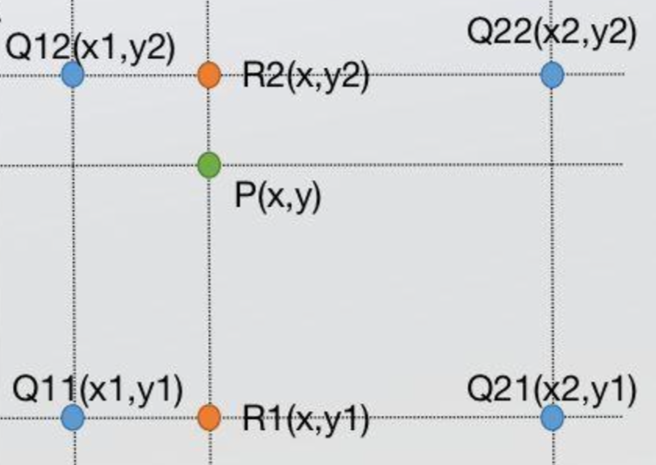 现在问题是平面上一个点(x,y),如何确定其像素,没必要将问题说成二维问题,仍然按照一维的描述,只需要两个辅助点即可,Q11、Q21是确定的,因此R1像素可以由插值法求得,同理R2亦可由插值法求得,那么P就是R1、R2线段的插值结果,也即双线性插值实际上做了三次单线性插值,其中两次是x方向,一次y方向(取法不唯一)。
现在问题是平面上一个点(x,y),如何确定其像素,没必要将问题说成二维问题,仍然按照一维的描述,只需要两个辅助点即可,Q11、Q21是确定的,因此R1像素可以由插值法求得,同理R2亦可由插值法求得,那么P就是R1、R2线段的插值结果,也即双线性插值实际上做了三次单线性插值,其中两次是x方向,一次y方向(取法不唯一)。
分别列出公式,因为方向不同,x、y均被占用,记Q11-Q21、Q12-Q22、R1-R2像素分布函数f1(x)、f2(x)、f3(y),R1、R2、P像素为z1 = f1(x),z2 = f2(x),z3 = f3(y),三条一维插值公式应该是:
f1(x),也可以是f3(y1),因此有:
x2-x1 = 1,y2-y1 = 1,就得到了P像素的表达式(其中下式分母部分全为1**,为了完整性没有简化掉):
其中f1(x1)、f1(x2)、f2(x1)、f2(x2)对应四个像素点像素,将分式写成权重,P像素进一步写成:
双线性插值的优化
根据最近邻插值的公式,问题是会带来几何中心的偏移:例如一个3*3图像的中心是(1,1),放大至7*7后,中心(3,3)元素应该对应源图(1,1),但是根据公式计算得约(1.286,1.286),几何中心向右下角偏移;
再次强调线性插值像素和位置应该是一一对应的,这种差异会带来些许的颜色偏移,但在卷积计算中这种偏移会导致整体的固有误差,应该避免。
OpenCV定义了一种权重分布来纠正这种误差,公式更新为:
还有另一个问题也应该知晓:在双线性插值中,图像放缩时并不是对每个像素都是公平的,例如按照旧公式来看从一个3*3图像放大至7*7后,一般以左上角第一个元素为(0,0)坐标,扩大操作新图像的(0,0)坐标像素就是源图的(0,0),而(6,6)却对应(2.57,2.57),注意3*3的最后一个像素应该是(2,2),说明对应关系发生了越界,而且是左右不均衡的。
以优化公式计算,这种不公平的偏移也得到了均衡,新图(0,0)对应的是(-0.2857,-0.2857),(6,6)对应的是(2.2857,2.2857)。
对于边界像素越界问题,不仅是双线性插值,而且卷积运算(滤波等操作)都会遇到,OpenCV也定义了处理边界外像素的相关策略,例如设置恒定常数、取最近像素等,参考Image Filtering《boxFilter》函数。在最近邻插中,因为没有新像素(大小均来自原来存在的像素),因此直接做了截断,而在双线性插值和双立方插值中,需要基于填充图计算新像素,因此需要考虑边界填充。
双线性插值实现
在使用上面的公式计算目标像素在源矩阵的参考坐标时,假设矩阵宽高均从4放大到5,我们会发现(0,0)对应的是(-0.1,-0.1),但是源矩阵根本不存在这个坐标像素,因此我们只需要做一个边值填充,因此我们先对4×4的源矩阵边缘做了size=2的padding,成为了8×8的矩阵。按新坐标系,5×5目标矩阵的(0,0)对应的参考点应该是(1.9,1.9),进而我们的纠正公式修正为:
C++边界填充函数: 1
2
3
4
5
6
7
8
9
10void cv::copyMakeBorder(
InputArray src,
OutputArray dst,
int top, //四个方向填充像素
int bottom,
int left,
int right,
int borderType,
const Scalar& value = Scalar() //填充类 型:BORDER_CONSTANT常数填充、BORDER_REPLICATE最近像素填充等
)
代码:实现单通道的双线性插值浮点数: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
using namespace std;
using namespace cv;
//双线性插值
Mat getBilinerMat(Mat& src_mat, int target_height, int target_width){
//尺度
double scale_x = (double)src_mat.cols/(double)target_width;
double scale_y = (double)src_mat.rows/(double)target_height;
//填充
int padSize = 2;
copyMakeBorder(src_mat,src_mat,padSize,padSize,padSize,padSize,BORDER_REPLICATE);
Mat result(target_height,target_width,src_mat.type());
for(int i=0; i<target_height; i++){
double y_ = (i+0.5)*scale_y + 1.5; //参考点y坐标
int round_y = round(y_+0.5); //计算y_+0.5四舍五入后每次都会对齐到y2像素,y2-1就是y1像素,方法不唯一
for(int j=0; j<target_width; j++){
double x_ = (j+0.5)*scale_x + 1.5; //参考点x坐标
int round_x = round(x_+0.5); //同y原理
int x1 = round_x-1; int y1 = round_y-1; //四邻域
int x2 = round_x; int y2 = round_y;
double w1 = (y2-y_)*(x2-x_);//权值计算
double w2 = (y2-y_)*(x_-x1);
double w3 = (y_-y1)*(x2-x_);
double w4 = (y_-y1)*(x_-x1);
//计算(i,j)的像素
result.at<double>(i,j) = w1*src_mat.at<double>(y1,x1) + w2*src_mat.at<double>(y1,x2) + \
w3*src_mat.at<double>(y2,x1) + w4*src_mat.at<double>(y2,x2);
}
}
return result;
}
int main(){
RNG rng;
Mat rawMat(4,4,CV_64FC1);
rng.fill(rawMat,RNG::UNIFORM,0,255);
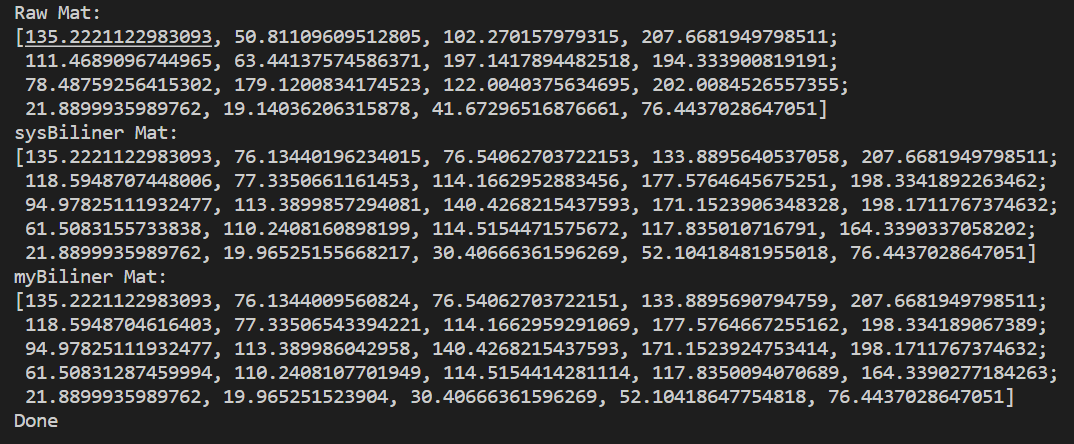
cout<<"Raw Mat:\n"<<rawMat<<endl;
Mat sysBiliner,myBiliner;
resize(rawMat,sysBiliner,Size(5,5),0,0,INTER_LINEAR);
cout<<"sysBiliner Mat:\n"<<sysBiliner<<endl;
myBiliner = getBilinerMat(rawMat,5,5);
cout<<"myBiliner Mat:\n"<<myBiliner<<endl;
cout<<"Done"<<endl;
return 0;
}
图像双线性插值
变换到三通道就可以了: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
using namespace std;
using namespace cv;
//双线性插值
Mat getBilinerMat(Mat& src_mat, int target_height, int target_width){
//尺度
double scale_x = (double)src_mat.cols/(double)target_width;
double scale_y = (double)src_mat.rows/(double)target_height;
//填充
int padSize = 2;
copyMakeBorder(src_mat,src_mat,padSize,padSize,padSize,padSize,BORDER_REPLICATE);
Mat result(target_height,target_width,src_mat.type());
for(int i=0; i<target_height; i++){
double y_ = (i+0.5)*scale_y + 1.5; //参考点坐标
int round_y = round(y_+0.5);
for(int j=0; j<target_width; j++){
double x_ = (j+0.5)*scale_x + 1.5; //参考点坐标
int round_x = round(x_+0.5);
int x1 = round_x-1; int y1 = round_y-1;
int x2 = round_x; int y2 = round_y;
double w1 = (y2-y_)*(x2-x_);
double w2 = (y2-y_)*(x_-x1);
double w3 = (y_-y1)*(x2-x_);
double w4 = (y_-y1)*(x_-x1);
//三通道
result.at<Vec3b>(i,j)[0] = w1*src_mat.at<Vec3b>(y1,x1)[0] + w2*src_mat.at<Vec3b>(y1,x2)[0] + \
w3*src_mat.at<Vec3b>(y2,x1)[0] + w4*src_mat.at<Vec3b>(y2,x2)[0];
result.at<Vec3b>(i,j)[1] = w1*src_mat.at<Vec3b>(y1,x1)[1] + w2*src_mat.at<Vec3b>(y1,x2)[1] + \
w3*src_mat.at<Vec3b>(y2,x1)[1] + w4*src_mat.at<Vec3b>(y2,x2)[1];
result.at<Vec3b>(i,j)[2] = w1*src_mat.at<Vec3b>(y1,x1)[2] + w2*src_mat.at<Vec3b>(y1,x2)[2] + \
w3*src_mat.at<Vec3b>(y2,x1)[2] + w4*src_mat.at<Vec3b>(y2,x2)[2];
}
}
return result;
}
int main(){
//图片插值
Mat rawPic = imread("C:\\Users\\24364\\C_git\\opencv_test\\jLena.jpg",1);
imshow("rawPic",rawPic);
Mat myBiliner = getBilinerMat(rawPic,1024,1024);
imshow("myBiliner",myBiliner);
waitKey(0);
destroyAllWindows();
cout<<"Done"<<endl;
return 0;
}
双三次插值INTER_CUBIC
权值计算输出矩阵
双三次插值,又称双立方插值,算法采用了像素点邻近16个像素点样本进行权重计算,因为是三阶平滑,考虑到了双立方插值没有考虑的灰度变化率问题,因此平滑效果一般比前二两种算法好。但也带来了大量的复杂图像运算。
可以从两种角度描述计算的数学方法;
对应位置相乘
假设现有4×4源矩阵放大成5×5目标矩阵,尝试计算目标矩阵(2,2)位置像素,利用前述双线性插入纠正公式计算参考点的公式:
矩阵乘法
上述对应位置相乘,在数学上用矩阵乘法表示,则X权值矩阵是4×1矩阵、Y权值矩阵是1×4矩阵,目标像素值满足:
elem = Y*src_matrix*X最后输出是一个1×1矩阵,该值即是目标像素值。
为什么Y矩阵既是4×4矩阵,又是1×4矩阵,看完下节方法会清晰,Y作为4×4矩阵时,每行的数值是一样的。
一些文章将公式写为三个4×4矩阵的乘法,实在有点误人子弟,由线性代数可知上述公式才是正确的行变换与列变换写法。
获取权值
给出双三次插值的权重公式:
其中a为系数,Matlab中取-0.5,OpenCV中定义的是-0.75;
在cv源码中中三次插值使用的系数是: 1
2
3
4coeffs[0] = ((A*(x + 1) - 5*A)*(x + 1) + 8*A)*(x + 1) - 4*A;
coeffs[1] = ((A + 2)*x - (A + 3))*x*x + 1;
coeffs[2] = ((A + 2)*(1 - x) - (A + 3))*(1 - x)*(1 - x) + 1;
coeffs[3] = 1.f - coeffs[0] - coeffs[1] - coeffs[2];coeffs[3]=A*x*x-A*x*x*x,它也是一个坐标变换,见下文。
开始时我也不理解为什么cv要进行这样的坐标变换,后面才知道这是通过偏移获取权重,首先看一下权重计算常规方法:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23double getWeight(doubl**e num){
const float a = -0.75;
double n = abs(num); //绝对值
//公式获取权重
double w = ((a+2)*pow(n,3)-(a+3)*pow(n,2)+1)*(n<=1)+\
(a*pow(n,3) - 5*a*pow(n,2)+8*a*n-4*a)*(n>1&&n<2);
return w;
}
//输入矩阵、参考点的x坐标、y坐标,计算X、Y方向的权值
Mat getWeightMatrix(Mat input,double baseline_x,double baseline_y){
Mat result(input.rows,input.cols,CV_64FC1);
if(!result.isContinuous()) //不连续,谨慎处理
return {};
for(int i=0; i<input.rows; i++){
double weightX = getWeight(i-baseline_x);
for(int j=0; j<input.cols; j++){
double weightY = getWeight(j-baseline_y);
result.at<double>(i,j) = weightX*weightY;
}
}
return result;
}
因此另一种方法,仅看x坐标(这里代表列),双三次插值的元素来自邻近四列数据,,与所求点的坐标差值一定分别是-2到-1、-1到0、0到1、1到2;例如一个源矩阵4*4矩阵放大成5*5目标矩阵,目标矩阵(2,2)对应源矩阵位置应该是(1.5,1.5),x方向离0、1、2、3列距离分别是-1.5、-0.5、0.5、1.5;y方向同理。
故知,从x方向上,权重公式只和列数相关,y方向则只和行数相关,令参考点位置(x0,y0)向下取整(位置上是向左上角)得到(u,v),参考点离其距离列和行分别是(Δx,Δy),即(x0,y0)=(u+Δx,v+Δy),例**如(1.5,1.5)=(1,1)+(0.5,0.5);
因此x方向,四列与参考点的分布依次是|1+Δx|、|Δx|、|1-Δx|、|2-Δx|(0<=Δx<=1),因为自变量是带绝对值的,因此无需讨论谁正谁负,因此对于每列权值均有:
1
2
3
4coeffs[0] = W(1+Δx) = Ax*x*x - 2A*x*x + A*x;
coeffs[1] = W(Δx) = (A+2)x*x*x - (A+3)*x*x + 1;
coeffs[2] = W(1-Δx) = -(A+2)x*x*x + (2A+3)*x*x - A*x;
coeffs[3] = W(2-Δx) = A*x*x-A*x*x*x
双三次插值的边值填充与完整算法
这部分思路主要参考插值算法|双三次插值算法,也比较清晰易懂,本文也会加以说明。如下。
现在开始处理边界像素,因为对于5×5目标矩阵,计算发现(0,0)对应的参考点是(-0.1,-0.1),是无法使用getObjectPixel函数获取像素值的,因为这是越界像素,且没有充足的4×4邻域去双三次插值,因此我们先对4×4的源矩阵边缘做了size=2的padding,成为了8×8的矩阵。后边的原理就几乎不变了,现在按新坐标系,5×5目标矩阵的(0,0)对应的参考点应该是(1.9,1.9),进而我们的纠正公式修正为:
利用这个padding矩阵,就可以填充目标矩阵的所有像素了,如下:
注意上述讲解,将x讨论成行,但是图像处理习惯使用x遍历图像的列,使用y遍历图像的行,因此代码中是y矩阵*16点矩阵乘*x矩阵,Δy代表垂直方向偏差。手搓代码时也应该注意这些差异。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
using namespace std;
using namespace cv;
//接收源矩阵、参考点坐标,输出目标像素
double getObjectPixel(Mat input,double baseline_x,double baseline_y){
// input.convertTo(input,CV_64FC1);
auto getWeight = [](int i,double x)->double{ //此处传入x是delta x或delta_y
const float a = -0.75;
if(i==0) //相当于coeffs[0]
return a*x*x*x - 2*a*x*x + a*x;
else if(i==1) //coeffs[1]
return (a+2)*x*x*x - (a+3)*x*x + 1;
else if(i==2) //coeffs[2]
return -(a+2)*x*x*x + (2*a+3)*x*x - a*x;
else if(i==3) //coeffs[3]
return a*x*x-a*x*x*x;
else
return 0.0;
};
//左上角取整
int stemp_x = floor(baseline_x);
int stemp_y = floor(baseline_y);
double delta_x = baseline_x - stemp_x;
double delta_y = baseline_y - stemp_y;
Mat xWeight(4,1,CV_64FC1);
Mat yWeight(1,4,CV_64FC1);
for(int i=0; i<4; i++){
xWeight.at<double>(i,0) = getWeight(i,delta_x);
yWeight.at<double>(0,i) = getWeight(i,delta_y);
}
//计算参考点附近十六个点矩阵,矩阵为参考点四舍五入的左2、右2、上2、下2范围
int x_round = round(baseline_x+0.5);
int y_round = round(baseline_y+0.5);
Mat Mat16_ = input(Range(y_round-2,y_round+2),Range(x_round-2,x_round+2));
// Mat Mat16_ = input(Range(stemp_y-1,stemp_y+3),Range(stemp_x-1,stemp_x+3));
Mat result = yWeight*Mat16_*xWeight;
// result.convertTo(result,CV_8UC1);
return result.at<double>(0,0); //Y权重*十六点矩阵*X权重矩阵,最后输出1×1矩阵就是(baseline_x,baseline_y)的像素
}
Mat getTargetMatrix(Mat& mSrc, int target_width, int target_height){
//填充
int padSize = 2;
Mat mPad;
copyMakeBorder(mSrc,mPad,padSize,padSize,padSize,padSize,BORDER_REPLICATE);
Mat mResult(target_height,target_width,CV_64FC1);
double scale_x = ((double)mSrc.cols/(double)target_width);
double scale_y = ((double)mSrc.rows/(double)target_height);
for(int i=0; i<target_height; i++){
double y_temp = (i+0.5) * scale_y + 1.5;
for(int j=0; j<target_width; j++){
double x_temp = (j+0.5) * scale_x + 1.5;
mResult.at<double>(i,j) = getObjectPixel(mPad,x_temp,y_temp);
}
}
return mResult;
}
int main(){
RNG rng;
Mat rawMat(4,4,CV_64FC1);
rng.fill(rawMat,RNG::UNIFORM,0,256,0);
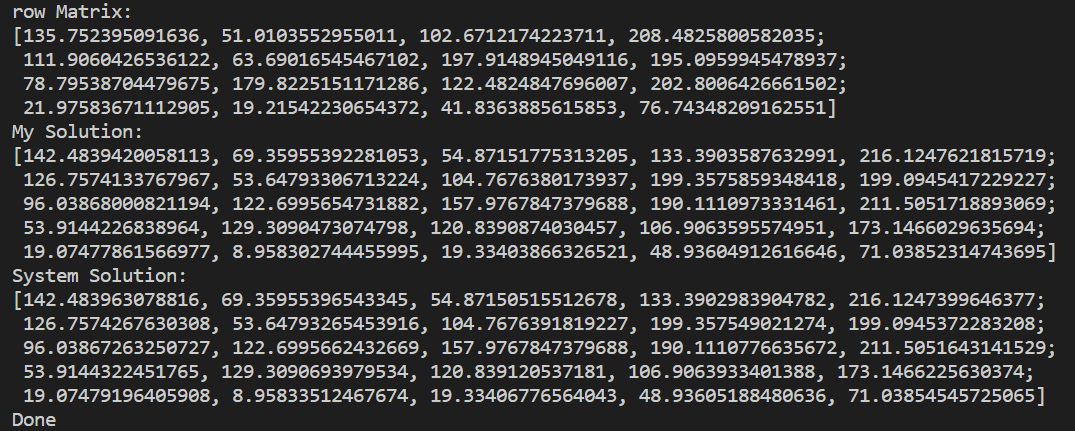
cout<<"row Matrix:\n"<<rawMat<<endl;
Mat mybiCubic,sysbiCubic;
mybiCubic=getTargetMatrix(rawMat,5,5); // 个人方法
resize(rawMat,sysbiCubic,Size(5,5),0,0,INTER_CUBIC);//系统方法
cout<<"My Solution:\n"<<mybiCubic<<endl;
cout<<"System Solution:\n"<<sysbiCubic<<endl;
cout<<"Done";
return 0;
}
同样原理,转换到三通道上,就能够得到插值放大的图片结果:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
using namespace std;
using namespace cv;
//接收源矩阵、参考点坐标,输出目标像素
vector<double> getObjectPixel(Mat input,double baseline_x,double baseline_y){
// input.convertTo(input,CV_64FC1);
auto getWeight = [](int i,double x)->double{ //此处传入x是delta x或delta_y
const float a = -0.75;
if(i==0) //相当于coeffs[0]
return a*x*x*x - 2*a*x*x + a*x;
else if(i==1) //coeffs[1]
return (a+2)*x*x*x - (a+3)*x*x + 1;
else if(i==2) //coeffs[2]
return -(a+2)*x*x*x + (2*a+3)*x*x - a*x;
else if(i==3) //coeffs[3]
return a*x*x-a*x*x*x;
else
return 0.0;
};
//左上角取整
int stemp_x = floor(baseline_x);
int stemp_y = floor(baseline_y);
double delta_x = baseline_x - stemp_x;
double delta_y = baseline_y - stemp_y;
Mat xWeight(4,1,CV_64FC1);
Mat yWeight(1,4,CV_64FC1);
for(int i=0; i<4; i++){
xWeight.at<double>(i,0) = getWeight(i,delta_x);
yWeight.at<double>(0,i) = getWeight(i,delta_y);
}
//计算参考点附近十六个点矩阵,矩阵为参考点四舍五入的左2、右2、上2、下2范围
int x_round = round(baseline_x+0.5);
int y_round = round(baseline_y+0.5);
Mat Mat16_ = input(Range(y_round-2,y_round+2),Range(x_round-2,x_round+2));
Mat Mat16_b(4,4,CV_64FC1); //分离通道各自计算
Mat Mat16_g(4,4,CV_64FC1);
Mat Mat16_r(4,4,CV_64FC1);
Mat m16[3] = {Mat16_b,Mat16_g,Mat16_r};
cv::split(Mat16_,m16);
Mat result_b = yWeight*Mat16_b*xWeight;
Mat result_g = yWeight*Mat16_g*xWeight;
Mat result_r = yWeight*Mat16_r*xWeight;
vector<double>result_array = {result_b.at<double>(0,0),result_g.at<double>(0,0),result_r.at<double>(0,0)};
return result_array;
}
Mat getTargetMatrix(Mat& mSrc, int target_width, int target_height){
//填充
int padSize = 2;
Mat mPad;
copyMakeBorder(mSrc,mPad,padSize,padSize,padSize,padSize,BORDER_REPLICATE);
Mat mResult(target_height,target_width,CV_64FC3); //三通道
double scale_x = ((double)mSrc.cols/(double)target_width);
double scale_y = ((double)mSrc.rows/(double)target_height);
for(int i=0; i<target_height; i++){
double y_temp = (i+0.5) * scale_y + 1.5;
for(int j=0; j<target_width; j++){
double x_temp = (j+0.5) * scale_x + 1.5;
//改变接收逻辑
mResult.at<Vec3d>(i,j)[0] = getObjectPixel(mPad,x_temp,y_temp)[0];
mResult.at<Vec3d>(i,j)[1] = getObjectPixel(mPad,x_temp,y_temp)[1];
mResult.at<Vec3d>(i,j)[2] = getObjectPixel(mPad,x_temp,y_temp)[2];
}
}
return mResult;
}
int main(){
Mat rawPic = imread("C:\\Users\\24364\\C_git\\opencv_test\\jLena.jpg",1);
imshow("rawPic",rawPic);
resize(rawPic,rawPic,Size(256,256),0,0); //防止计算量太大编译太慢,先缩小一半再计算
int padSize = 200;//仅填充图结果
Mat padPic;
copyMakeBorder(rawPic,padPic,padSize,padSize,padSize,padSize,BORDER_REPLICATE);
imshow("padPic",padPic);
//插值结果,结果应该和原图大小一致
rawPic.convertTo(rawPic,CV_64FC3);
Mat test = getTargetMatrix(rawPic,512,512);
test.convertTo(test,CV_8UC3);
imshow("test",test);
cout<<"Done";
waitKey(0);
destroyAllWindows();
return 0;
}
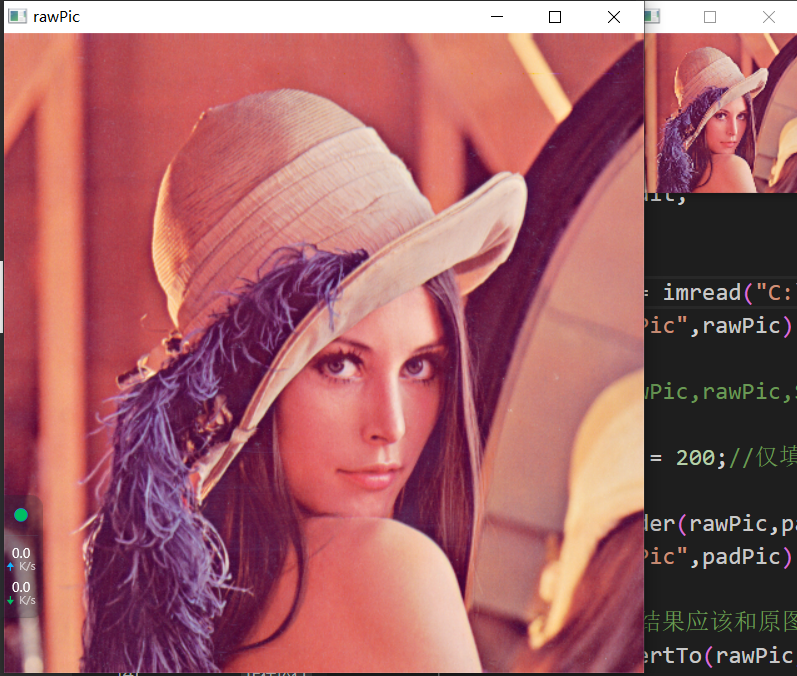
效果: 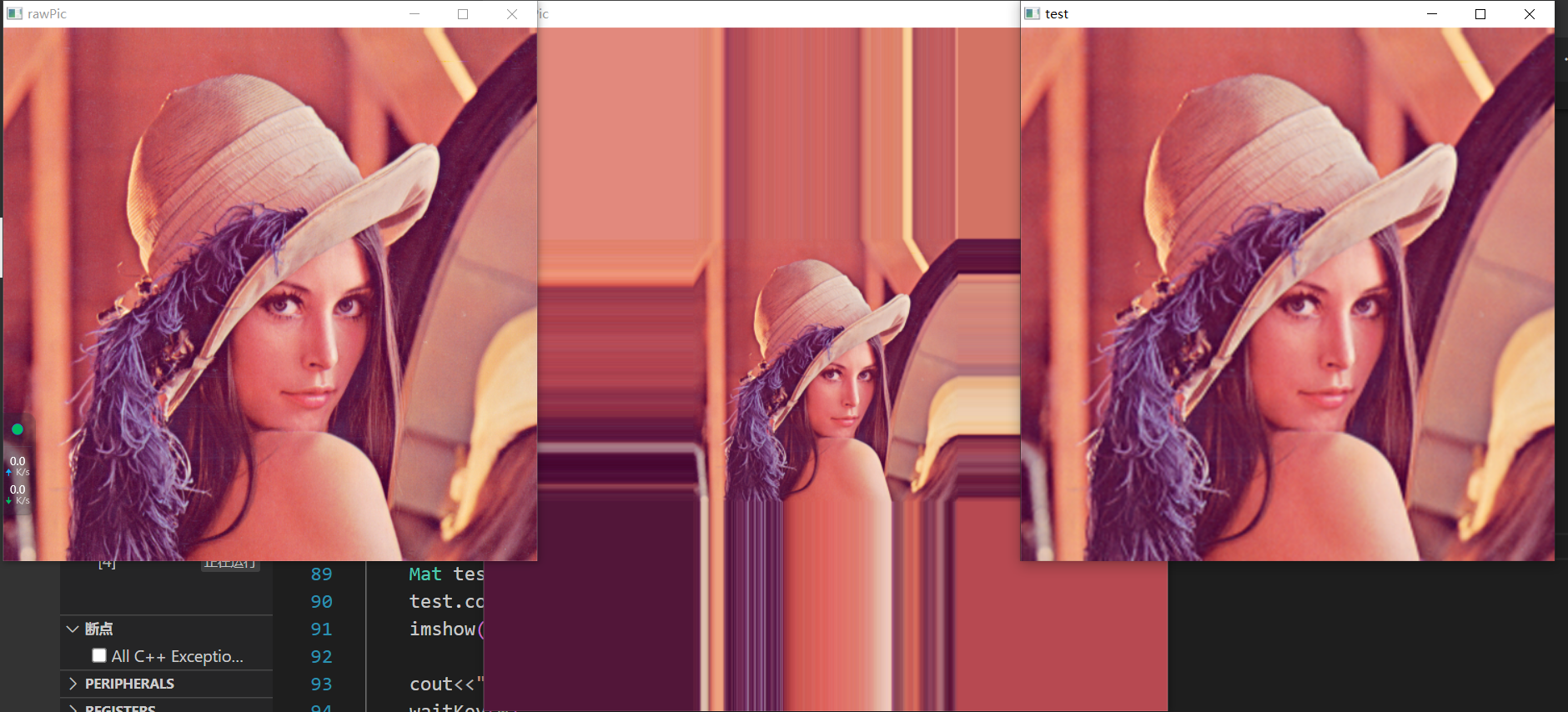 可以看到,中间的图是左侧的图直接使用邻近值边值填充的效果,造成边缘的拉伸;最右边是经过双三次插值的效果,比原图略微模糊,成功实现图的放大(这里为了减少双三次的计算量,先resize了一半再恢复原图);再者,我们几乎没有讨论过图的缩小行为,这是因为OpenCV很少主动使用双三次插值进行缩小,但缩小本身也就一种下采样,也是能实现效果嘚,将512下采样成128大小如图:
可以看到,中间的图是左侧的图直接使用邻近值边值填充的效果,造成边缘的拉伸;最右边是经过双三次插值的效果,比原图略微模糊,成功实现图的放大(这里为了减少双三次的计算量,先resize了一半再恢复原图);再者,我们几乎没有讨论过图的缩小行为,这是因为OpenCV很少主动使用双三次插值进行缩小,但缩小本身也就一种下采样,也是能实现效果嘚,将512下采样成128大小如图:
使用像素区域关系重采样INTER_AREA
正如上文所述,OpenCV通常不会使用双三次插值进行图像缩小,而是推荐使用INTER_AREA,OpenCV仅说明其“根据像素区域关系重采样”得到结果,没有具体描述原理,好在还是找到了吃螃蟹的人,参考Aaron
Dong的这篇分享OpenCV里的INTER_AREA究竟是在做啥?能比较清楚,以下均为原文摘录。
INTER_AREA时机
使用
INTER_LINEAR或者INTER_LINEAR_EXACT(双线性插值的高精度版本):当长宽缩小均为两倍、且图像通道不为2,那么实际上还是调用INTER_AREA方法;使用
INTER_AREA时,对于宽和高,如果执行的是放大操作,那么实际上调用的是INTER_LINEAR;
可见指定INTER_AREA,也不一定是调用INTER_AREA方法,不指定INTER_AREA,也未必不是INTER_AREA;
INTER_AREA缩小
INTER_AREA重采样原理,举例:
当宽和高均缩小三倍时,会在源矩阵构造3×3的Block,这个Block的平均像素,就是目标图像的新像素值;
当缩小倍数不是整数时,仍然遵循这种计算方法。
INTER_AREA放大
实际上调用的是“特殊的双线性插值INTER_LINEAR”,这个特殊性OpenCV系统已经实现,就是调用INTER_LINEAR;
使用上节双线性插值代码可以发现,大部分计算都是和直接调用INTER_LINEAR是相近的,但是当数据是一维的[0,1],resize成1×4矩阵,我的程序输出结果是[0,
0.25, 0.75,
1],这就是普通双线性插值的思想;而调用resize的INTER_LINEAR,输出是[0.5,
0.5, 0.5,
0.5],说明这种情况的双线性插值系数是被特殊指定的。
参考链接: